Conditional Neural Process (CNP)¶
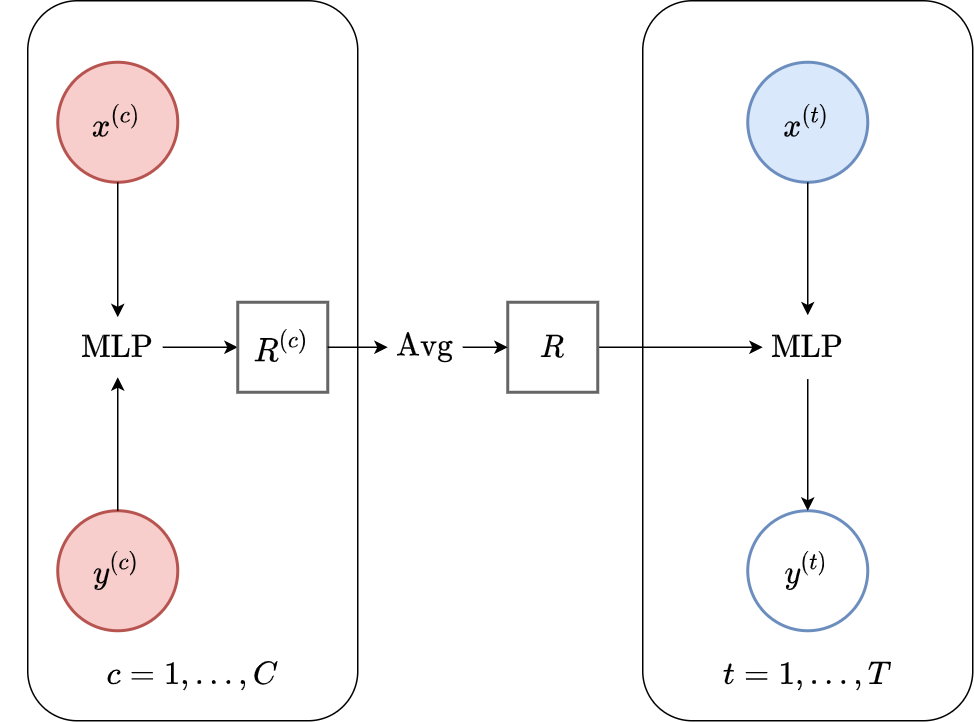
Fig. 49 Computational graph for Conditional Neural Processes.¶
In this notebook we will show how to train a CNP on samples from GPs and images using our framework, as well as how to make nice visualizations. CNPs are CNPFs that use a MLP+mean encoder (computational graph in Fig. 49).
%matplotlib inline
%config InlineBackend.figure_format = 'retina'
import logging
import os
import warnings
import matplotlib.pyplot as plt
import torch
os.chdir("../..")
warnings.filterwarnings("ignore")
warnings.simplefilter("ignore")
logging.disable(logging.ERROR)
N_THREADS = 8
IS_FORCE_CPU = False # Nota Bene : notebooks don't deallocate GPU memory
if IS_FORCE_CPU:
os.environ["CUDA_VISIBLE_DEVICES"] = ""
torch.set_num_threads(N_THREADS)
Initialization¶
Let’s load all the data. For more details about the data and some samples, see the data notebook.
from utils.ntbks_helpers import get_all_gp_datasets, get_img_datasets
# DATASETS
# merges : get_datasets_single_gp, get_datasets_varying_hyp_gp, get_datasets_varying_kernel_gp
gp_datasets, gp_test_datasets, gp_valid_datasets = get_all_gp_datasets()
# image datasets
img_datasets, img_test_datasets = get_img_datasets(["celeba32", "mnist", "zsmms"])
Now let’s define the context target splitters using CntxtTrgtGetter, which given a data point will return the context set and target set by selecting randomly selecting some points and preprocessing them so that the features are in \([-1,1]\).
To make it compatible with the collate function (a function that “batchifies” the samples) of Pytorch dataloaders, we wrap it by cntxt_trgt_collate.
For the 1d case :
target set : entire sample (
get_all_indcs).context set : uniformly select between 0 and 50 points (
GetRandomIndcs(a=0.0, b=50)).
For the 2d case we use GridCntxtTrgtGetter,RandomMasker,no_masker which are wrappers around CntxtTrgtGetter,GetRandomIndcs,get_all_indcs :
target set : entire sample.
context set : uniformly select between 0 and \(30\%\) of the pixels.
In the case of zsmms, which test on a different canvas size (extrapolation) than during training, we will define a special context target splitter which preprocesses the features to the correct extrapolation range \([- \frac{56}{32}, \frac{56}{32}]\) instead of the usual \([- 1, 1]\).
Tip
There are many more ways of splitting context and target functions in npf.utils.datasplit.
from npf.utils.datasplit import (
CntxtTrgtGetter,
GetRandomIndcs,
GridCntxtTrgtGetter,
RandomMasker,
get_all_indcs,
no_masker,
)
from utils.data import cntxt_trgt_collate, get_test_upscale_factor
# CONTEXT TARGET SPLIT
# 1d
get_cntxt_trgt_1d = cntxt_trgt_collate(
CntxtTrgtGetter(
contexts_getter=GetRandomIndcs(a=0.0, b=50), targets_getter=get_all_indcs,
)
)
# same as in 1D but with masks (2d) rather than indices
get_cntxt_trgt_2d = cntxt_trgt_collate(
GridCntxtTrgtGetter(
context_masker=RandomMasker(a=0.0, b=0.3), target_masker=no_masker,
)
)
# for ZSMMS you need the pixels to not be in [-1,1] but [-1.75,1.75] (i.e 56 / 32) because you are extrapolating
get_cntxt_trgt_2d_extrap = cntxt_trgt_collate(
GridCntxtTrgtGetter(
context_masker=RandomMasker(a=0, b=0.3),
target_masker=no_masker,
upscale_factor=get_test_upscale_factor("zsmms"),
)
)
Let’s now define the models. For both the 1D and 2D case we will be using the following:
Encoder \(\mathrm{Enc}_{\theta}\) : a 1-hidden layer MLP that encodes the features \(\{x^{(i)}\} \mapsto \{x_{transformed}^{(i)}\}\) (
XEncoder), followed by a 2 hidden layer MLP that locally encodes each feature-value pair \(\{x_{transformed}^{(i)}, y^{(i)}\} \mapsto \{R^{(i)}\}\) (XYEncoder), followed by a mean aggregator.Decoder \(\mathrm{Dec}_{\theta}\): a 4 hidden layer MLP that predicts the distribution of the target value given the global representation and target context \(\{R, x^{(t)}\} \mapsto \{\mu^{(t)}, \sigma^{2(t)}\}\).
All hidden representations will be of R_DIM=128 dimensions besides the encoder which has width \(128*2\) for the 1D case and \(128*3\) for the 2D case (to have similar number of parameters than other NPFs). Note that in the implementation the only differences between images and samples from GPs is x_dim=2.
from functools import partial
from npf import CNP
from npf.architectures import MLP, merge_flat_input
from utils.helpers import count_parameters
R_DIM = 128
KWARGS = dict(
XEncoder=partial(MLP, n_hidden_layers=1, hidden_size=R_DIM),
Decoder=merge_flat_input( # MLP takes single input but we give x and R so merge them
partial(MLP, n_hidden_layers=4, hidden_size=R_DIM), is_sum_merge=True,
),
r_dim=R_DIM,
)
# 1D case
model_1d = partial(
CNP,
x_dim=1,
y_dim=1,
XYEncoder=merge_flat_input( # MLP takes single input but we give x and y so merge them
partial(MLP, n_hidden_layers=2, hidden_size=R_DIM * 2), is_sum_merge=True,
),
**KWARGS,
)
# image (2D) case
model_2d = partial(
CNP,
x_dim=2,
XYEncoder=merge_flat_input( # MLP takes single input but we give x and y so merge them
partial(MLP, n_hidden_layers=2, hidden_size=R_DIM * 3), is_sum_merge=True,
),
**KWARGS,
) # don't add y_dim yet because depends on data (colored or gray scale)
# Param count
n_params_1d = count_parameters(model_1d())
n_params_2d = count_parameters(model_2d(y_dim=3))
print(f"Number Parameters (1D): {n_params_1d:,d}")
print(f"Number Parameters (2D): {n_params_2d:,d}")
Number Parameters (1D): 252,098
Number Parameters (2D): 367,750
For all the CNPFs, we tried to keep the number of parameters comparable.
For more details about all the possible parameters, refer to the docstrings of CNP and the base class NeuralProcessFamily.
# CNP Docstring
print(CNP.__doc__)
Conditional Neural Process from [1].
Parameters
----------
x_dim : int
Dimension of features.
y_dim : int
Dimension of y values.
XYEncoder : nn.Module, optional
Encoder module which maps {x_transf_i, y_i} -> {r_i}. It should be constructable
via `XYEncoder(x_transf_dim, y_dim, n_out)`. If you have an encoder that maps
[x;y] -> r you can convert it via `merge_flat_input(Encoder)`. `None` uses
MLP. In the computational model this corresponds to `h` (with XEncoder).
Example:
- `merge_flat_input(MLP, is_sum_merge=False)` : learn representation
with MLP. `merge_flat_input` concatenates (or sums) X and Y inputs.
- `merge_flat_input(SelfAttention, is_sum_merge=True)` : self attention mechanisms as
[4]. For more parameters (attention type, number of layers ...) refer to its docstrings.
- `discard_ith_arg(MLP, 0)` if want the encoding to only depend on Y.
kwargs :
Additional arguments to `NeuralProcessFamily`
References
----------
[1] Garnelo, Marta, et al. "Conditional neural processes." arXiv preprint
arXiv:1807.01613 (2018).
# NeuralProcessFamily Docstring
from npf import NeuralProcessFamily
print(NeuralProcessFamily.__doc__)
Base class for members of the neural process family.
Notes
-----
- when writing size of vectors something like `size=[batch_size,*n_cntxt,y_dim]` means that the
first dimension is the batch, the last is the target values and everything in the middle are context
points. We use `*n_cntxt` as it can be a single flattened dimension or many (for example on the grid).
Parameters
----------
x_dim : int
Dimension of features.
y_dim : int
Dimension of y values.
encoded_path : {"latent", "both", "deterministic"}
Which path(s) to use:
- `"deterministic"` no latents : the decoder gets a deterministic representation s input.
- `"latent"` uses latent : the decoder gets a sample latent representation as input.
- `"both"` concatenates both the deterministic and sampled latents as input to the decoder.
r_dim : int, optional
Dimension of representations.
x_transf_dim : int, optional
Dimension of the encoded X. If `-1` uses `r_dim`. if `None` uses `x_dim`.
is_heteroskedastic : bool, optional
Whether the posterior predictive std can depend on the target features. If using in conjuction
to `NllLNPF`, it might revert to a *CNP model (collapse of latents). If the flag is False, it
pools all the scale parameters of the posterior distribution. This trick is only exactly
recovers heteroskedasticity when the set target features are always the same (e.g.
predicting values on a predefined grid) but is a good approximation even when not.
XEncoder : nn.Module, optional
Spatial encoder module which maps {x^i}_i -> {x_trnsf^i}_i. It should be
constructable via `XEncoder(x_dim, x_transf_dim)`. `None` uses MLP. Example:
- `MLP` : will learn positional embeddings with MLP
- `SinusoidalEncodings` : use sinusoidal positional encodings.
Decoder : nn.Module, optional
Decoder module which maps {(x^t, r^t)}_t -> {p_y_suffstat^t}_t. It should be constructable
via `decoder(x_dim, r_dim, n_out)`. If you have an decoder that maps
[r;x] -> y you can convert it via `merge_flat_input(Decoder)`. `None` uses MLP. In the
computational model this corresponds to `g`.
Example:
- `merge_flat_input(MLP)` : predict with MLP.
- `merge_flat_input(SelfAttention, is_sum_merge=True)` : predict
with self attention mechanisms (using `X_transf + Y` as input) to have
coherent predictions (not use in attentive neural process [1] but in
image transformer [2]).
- `discard_ith_arg(MLP, 0)` if want the decoding to only depend on r.
PredictiveDistribution : torch.distributions.Distribution, optional
Predictive distribution. The input to the constructor are currently two values of the same
shape : `loc` and `scale`, that are preprocessed by `p_y_loc_transformer` and
`pred_scale_transformer`.
p_y_loc_transformer : callable, optional
Transformation to apply to the predicted location (e.g. mean for Gaussian)
of Y_trgt.
p_y_scale_transformer : callable, optional
Transformation to apply to the predicted scale (e.g. std for Gaussian) of
Y_trgt. The default follows [3] by using a minimum of 0.01.
References
----------
[1] Kim, Hyunjik, et al. "Attentive neural processes." arXiv preprint
arXiv:1901.05761 (2019).
[2] Parmar, Niki, et al. "Image transformer." arXiv preprint arXiv:1802.05751
(2018).
[3] Le, Tuan Anh, et al. "Empirical Evaluation of Neural Process Objectives."
NeurIPS workshop on Bayesian Deep Learning. 2018.
Training¶
The main function for training is train_models which trains a dictionary of models on a dictionary of datasets and returns all the trained models.
See its docstring for possible parameters.
# train_models Docstring
from utils.train import train_models
print(train_models.__doc__)
Train or loads the models.
Parameters
----------
datasets : dict
The datasets on which to train the models.
models : dict
The models to train (initialized or not). Each model will be trained on
all datasets. If the initialzed models are passed, it will continue
training from there. Can also give a dictionary of dictionaries, if the
models to train depend on the dataset.
criterion : nn.Module
The uninitialized criterion (loss).
test_datasets : dict, optional
The test datasets. If given, the corresponding models will be evaluated
on those, the log likelihood for each datapoint will be saved in the
in the checkpoint directory as `eval.csv`.
valid_datasets : dict, optional
The validation datasets.
chckpnt_dirname : str, optional
Directory where checkpoints will be saved. The best (if validation or train_split given)
or last model will be saved.
is_continue_train : bool, optional
Whether to continue training from the last checkpoint of the previous run.
is_retrain : bool, optional
Whether to retrain the model. If not, `chckpnt_dirname` should be given
to load the pretrained model.
runs : int, optional
How many times to run the model. Each run will be saved in
`chckpnt_dirname/run_{}`. If a seed is give, it will be incremented at
each run.
starting_run : int, optional
Starting run. This is useful if a couple of runs have already been trained,
and you want to continue from there.
train_split : callable, optional
If None, there is no train/validation split. Else, train_split
should be a function or callable that is called with X and y
data and should return the tuple ``dataset_train, dataset_valid``.
The validation data may be None. Use `skorch.dataset.CVSplit` to randomly
split the data into train and validation. Only used for datasets that are not in
`valid_datasets.`.
device : str, optional
The compute device to be used (input to torch.device). If `None` uses
"cuda" if available else "cpu".
max_epochs : int, optional
Maximum number of epochs.
batch_size : int, optional
Training batch size.
lr : float, optional
Learning rate.
optimizer : torch.optim.Optimizer, optional
Optimizer.
callbacks : list, optional
Callbacks to use.
patience : int, optional
Patience for early stopping. If not `None` has to be given a validation
set.
decay_lr : float, optional
Factor by which to decay the learning rate during training. For example if 100 then it
will decrease the learning rate with exponential decrease such that at the end of training
the learning rate decreased by a factot 100.
is_reeval : bool, optional
Whether to reevaluate the model even if already evaluated and `is_retrain` is False.
seed : int, optional
Pseudo random seed to force deterministic results (on CUDA might still
differ a little).
datasets_kwargs : dict, optional
Dictionary of datasets specific kwargs.
models_kwargs : dict, optional
Dictionary of model specific kwargs.
kwargs :
Additional arguments to `NeuralNet`.
Computational Notes :
the following will either train all the models (
is_retrain=True) or load the pretrained models (is_retrain=False)the code will use a (single) GPU if available
decrease the batch size if you don’t have enough memory
30 epochs should give you descent results for the GP datasets (instead of 100)
the GP data is generated for every epoch and then saved. Make sure you use
get_all_gp_datasets(is_save=False)if you use a large number of epochs.
import skorch
from npf import CNPFLoss
from utils.ntbks_helpers import add_y_dim
from utils.train import train_models
KWARGS = dict(
is_retrain=False, # whether to load precomputed model or retrain
criterion=CNPFLoss, # Standard loss for conditional NPFs
chckpnt_dirname="results/pretrained/",
device=None, # use GPU if available
batch_size=32,
lr=1e-3,
decay_lr=10, # decrease learning rate by 10 during training
seed=123,
)
# 1D
trainers_1d = train_models(
gp_datasets,
{"CNP": model_1d},
test_datasets=gp_test_datasets,
train_split=None, # No need of validation as the training data is generated on the fly
iterator_train__collate_fn=get_cntxt_trgt_1d,
iterator_valid__collate_fn=get_cntxt_trgt_1d,
max_epochs=100,
**KWARGS
)
# 2D
trainers_2d = train_models(
img_datasets,
add_y_dim({"CNP": model_2d}, img_datasets), # y_dim (channels) depend on data
test_datasets=img_test_datasets,
train_split=skorch.dataset.CVSplit(0.1), # use 10% of training for valdiation
iterator_train__collate_fn=get_cntxt_trgt_2d,
iterator_valid__collate_fn=get_cntxt_trgt_2d,
datasets_kwargs=dict(
zsmms=dict(iterator_valid__collate_fn=get_cntxt_trgt_2d_extrap,)
), # for zsmm use extrapolation
max_epochs=50,
**KWARGS
)
--- Loading RBF_Kernel/CNP/run_0 ---
RBF_Kernel/CNP/run_0 | best epoch: None | train loss: 8.4633 | valid loss: None | test log likelihood: -16.1129
--- Loading Periodic_Kernel/CNP/run_0 ---
Periodic_Kernel/CNP/run_0 | best epoch: None | train loss: 129.0426 | valid loss: None | test log likelihood: -126.4177
--- Loading Noisy_Matern_Kernel/CNP/run_0 ---
Noisy_Matern_Kernel/CNP/run_0 | best epoch: None | train loss: 111.3382 | valid loss: None | test log likelihood: -115.7692
--- Loading Variable_Matern_Kernel/CNP/run_0 ---
Variable_Matern_Kernel/CNP/run_0 | best epoch: None | train loss: -91.6702 | valid loss: None | test log likelihood: -1076.2766
--- Loading All_Kernels/CNP/run_0 ---
All_Kernels/CNP/run_0 | best epoch: None | train loss: 79.7617 | valid loss: None | test log likelihood: -80.6751
--- Loading celeba32/CNP/run_0 ---
celeba32/CNP/run_0 | best epoch: 49 | train loss: -2554.1602 | valid loss: -2621.283 | test log likelihood: 2559.7317
--- Loading mnist/CNP/run_0 ---
mnist/CNP/run_0 | best epoch: 39 | train loss: -2086.9348 | valid loss: -2184.0321 | test log likelihood: 2062.8485
--- Loading zsmms/CNP/run_0 ---
zsmms/CNP/run_0 | best epoch: 2 | train loss: -1265.6857 | valid loss: 12485.7897 | test log likelihood: -58552.0945
Plots¶
Let’s visualize how well the model performs in different settings.
GPs Dataset¶
Let’s define a plotting function that we will use in this section. For each dataset-model pair it plots the posterior distribution for various context sets (aggregated in a gif).
The main functions we are using are:
giffify: call multiple times a function with different parameters and make a gif with the outputs.plot_multi_posterior_samples_1d: sample some context and target set for each dataset, callplot_posterior_samples_1d, and aggregate the plots row wise.plot_posterior_samples_1d: core underlying plotting function.
Some important parameters are shown below, for more information refer to the docstrings of these functions .
from utils.ntbks_helpers import PRETTY_RENAMER, plot_multi_posterior_samples_1d
from utils.visualize import giffify
def multi_posterior_gp_gif(filename, trainers, datasets, seed=123, **kwargs):
giffify(
save_filename=f"jupyter/gifs/{filename}.gif",
gen_single_fig=plot_multi_posterior_samples_1d, # core plotting
sweep_parameter="n_cntxt", # param over which to sweep
sweep_values=[1, 2, 5, 7, 10, 15, 20, 30, 50, 100],
fps=1., # gif speed
# PLOTTING KWARGS
trainers=trainers,
datasets=datasets,
is_plot_generator=True, # plot underlying GP
is_plot_real=False, # don't plot sampled / underlying function
is_plot_std=True, # plot the predictive std
is_fill_generator_std=False, # do not fill predictive of GP
pretty_renamer=PRETTY_RENAMER, # pretiffy names of modulte + data
# Fix formatting for coherent GIF
plot_config_kwargs=dict(
set_kwargs=dict(ylim=[-3, 3]), rc={"legend.loc": "upper right"}
),
seed=seed,
**kwargs,
)
Let us visualize the CNP when it is trained on samples from a single GP.
def filter_single_gp(d):
"""Select only data form single GP."""
return {k: v for k, v in d.items() if ("All" not in k) and ("Variable" not in k)}
multi_posterior_gp_gif(
"CNP_single_gp",
trainers=filter_single_gp(trainers_1d),
datasets=filter_single_gp(gp_test_datasets),
)
Fig. 50 Posterior predictive of CNPs (Blue line with shaded area for \(\mu \pm \sigma\)) and the oracle GP (Green line with dashes for \(\mu \pm \sigma\)) when conditioned on contexts points (Black) from an underlying function sampled from a GP. Each row corresponds to a different kernel and CNP trained on samples for the corresponding GP.¶
From Fig. 50 we see that CNP captures some information from the underlying GP, but (i) it suffers from underfitting in the case of RBF and Matern kernel; (ii) it is not able to model the periodic kernel.
###### ADDITIONAL 1D PLOTS ######
### RBF ###
def filter_rbf(d):
"""Select only data form RBF."""
return {k: v for k, v in d.items() if ("RBF" in k)}
multi_posterior_gp_gif(
"CNP_rbf",
trainers=filter_rbf(trainers_1d),
datasets=filter_rbf(gp_test_datasets),
)
### Periodic ###
def filter_periodic(d):
"""Select only data from periodic."""
return {k: v for k, v in d.items() if ("Periodic" in k)}
multi_posterior_gp_gif(
"CNP_periodic",
trainers=filter_periodic(trainers_1d),
datasets=filter_periodic(gp_test_datasets),
)
### Extrap ###
multi_posterior_gp_gif(
"CNP_single_gp_extrap",
trainers=filter_single_gp(trainers_1d),
datasets=filter_single_gp(gp_test_datasets),
left_extrap=-2, # shift signal 2 to the right for extrapolation
right_extrap=2, # shift signal 2 to the right for extrapolation
)
### Varying hyperparam ###
def filter_hyp_gp(d):
return {k: v for k, v in d.items() if ("Variable" in k)}
multi_posterior_gp_gif(
"CNP_vary_gp",
trainers=filter_hyp_gp(trainers_1d),
datasets=filter_hyp_gp(gp_test_datasets),
model_labels=dict(main="Model", generator="Fitted GP"),
)
### All kernels ###
# data with varying kernels simply merged single kernels
single_gp_datasets = filter_single_gp(gp_test_datasets)
# use same trainer for all, but have to change their name to be the same as datasets
base_trainer_name = "All_Kernels/CNP/run_0"
trainer = trainers_1d[base_trainer_name]
replicated_trainers = {}
for name in single_gp_datasets.keys():
replicated_trainers[base_trainer_name.replace("All_Kernels", name)] = trainer
multi_posterior_gp_gif(
"CNP_kernel_gp",
trainers=replicated_trainers,
datasets=single_gp_datasets,
)
Image Dataset¶
Let us now look at the case of more realistic datasets, when we do not have access to the underlying data generating process : images.
For plotting, we will again use giffify to make a gif for different context sets. The code is very similar but we have to replace plot_multi_posterior_samples_1d, plot_posterior_samples_1d by plot_multi_posterior_samples_imgs, plot_posterior_samples
from utils.ntbks_helpers import plot_multi_posterior_samples_imgs
def multi_posterior_imgs_gif(filename, trainers, datasets, seed=123, **kwargs):
giffify(
save_filename=f"jupyter/gifs/{filename}.gif",
gen_single_fig=plot_multi_posterior_samples_imgs, # core plotting
sweep_parameter="n_cntxt", # param over which to sweep
sweep_values=[
0,
0.005,
0.01,
0.02,
0.05,
0.1,
0.15,
0.2,
0.3,
0.5,
"hhalf", # horizontal half of the image
"vhalf", # vertival half of the image
],
fps=1., # gif speed
# PLOTTING KWARGS
trainers=trainers,
datasets=datasets,
n_plots=3, # images per datasets
is_plot_std=True, # plot the predictive std
pretty_renamer=PRETTY_RENAMER, # pretiffy names of modulte + data
plot_config_kwargs={"font_scale":0.7},
# Fix formatting for coherent GIF
seed=seed,
**kwargs,
)
Let us visualize the CNP when it is trained on samples from different image datasets that do not involve extrapolation.
def filter_interpolation(d):
"""Filter out zsmms which requires extrapolation."""
return {k: v for k, v in d.items() if "zsmms" not in k}
multi_posterior_imgs_gif(
"CNP_img_interp",
trainers=filter_interpolation(trainers_2d),
datasets=filter_interpolation(img_test_datasets),
)
Fig. 51 Mean and std of the posterior predictive of a CNP for CelebA \(32\times32\) and MNIST for different context sets.¶
From Fig. 51 we see that the CNPs again underfit, to the point where it cannot even predict well when conditioned on the entire image (see MNIST).
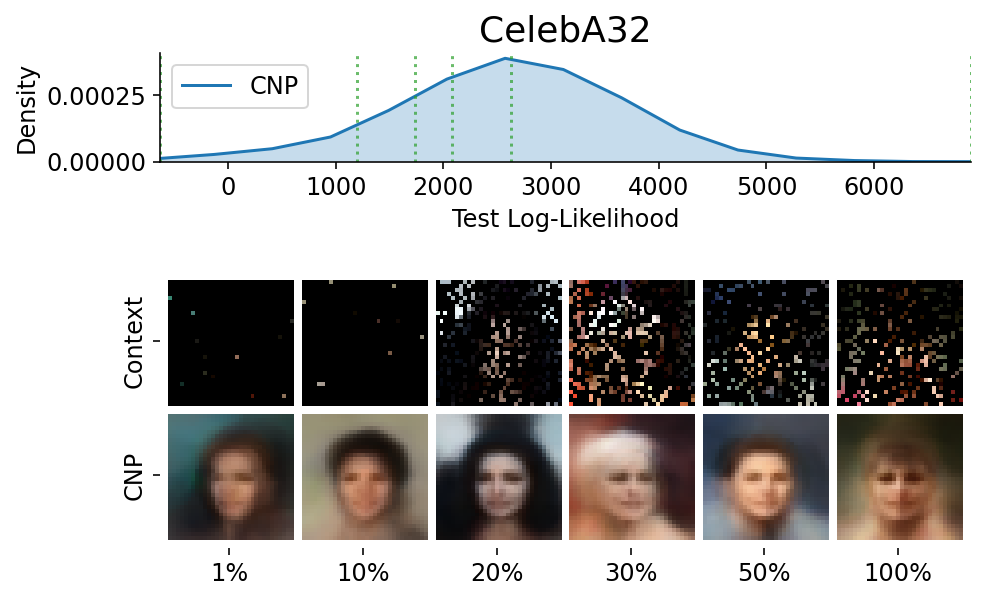
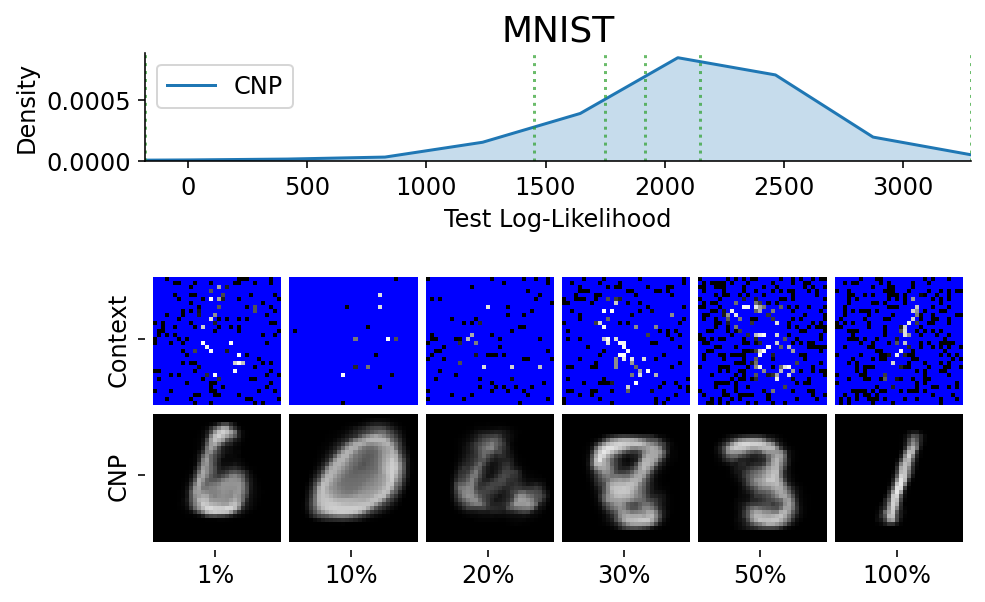
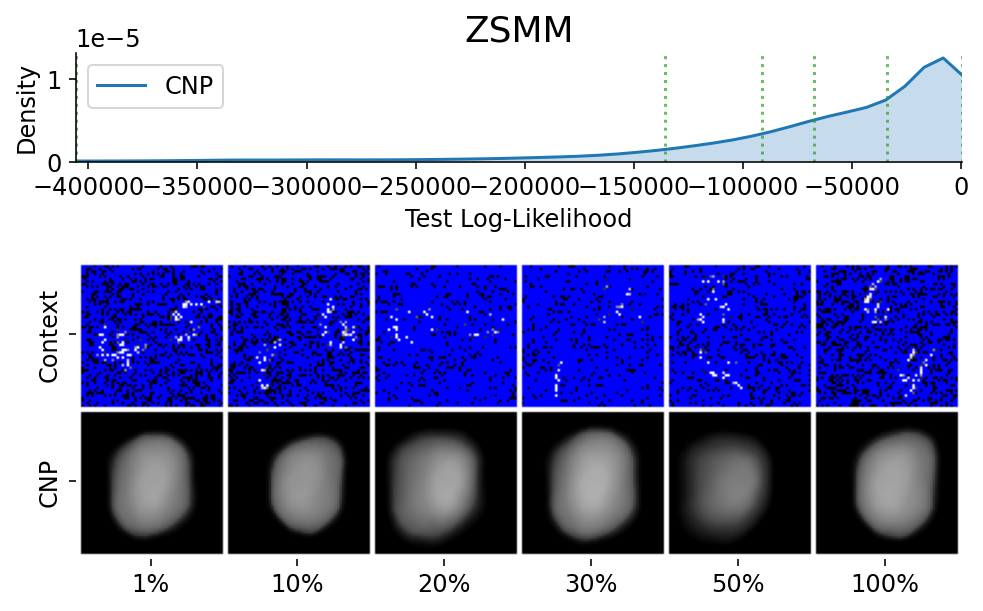
To make sure that the samples are representative / not cherry picked, we can explicitly sample images and context sets that reached a given percentile of the test log likelihood.
This is done using plot_qualitative_with_kde.
from utils.visualize import plot_qualitative_with_kde
n_trainers = len(trainers_2d)
for i, (k, trainer) in enumerate(trainers_2d.items()):
data_name = k.split("/")[0]
model_name = k.split("/")[1]
dataset = img_test_datasets[data_name]
plot_qualitative_with_kde(
[PRETTY_RENAMER[model_name], trainer],
dataset,
figsize=(7, 5),
percentiles=[1, 10, 20, 30, 50, 100], # desired test percentile
height_ratios=[1, 5], # kde / image ratio
is_smallest_xrange=True, # rescale X axis based on percentile
h_pad=-1, # padding
title=PRETTY_RENAMER[data_name],
upscale_factor=get_test_upscale_factor(data_name),
)
###### ADDITIONAL 2D PLOTS ######
### Gif all images ###
multi_posterior_imgs_gif("CNP_img", trainers=trainers_2d, datasets=img_test_datasets)